近日,地球科学学院硕士生栾婧在中文核心期刊《金属矿山》上发表题为“基于多模态信息融合的矿井辅助运输机器人自主导航方法”的研究论文。该论文研究提出了一种基于多模态信息融合的辅助运输机器人自主导航方法,通过结合多种方法,采用改进Rtabmap算法实现高精度定位与建图,优化A*算法提升路径规划效率,为煤矿井工作提供了有效解决方案。长江大学地球科学学院为论文第一署名单位,硕士生栾婧为论文第一作者。

图1 论文首页
本研究针对煤矿井下辅助运输自主导航的难题,创新性地提出了一种基于多模态信息融合的自主导航方法。通过集成激光雷达、RGB-D相机和IMU传感器,实现了点云、图像与位姿数据的多源信息融合。研究方法采用改进的Rtabmap算法实现高精度SLAM建图,结合指数加权优化的A*算法和二阶贝塞尔曲线路径平滑技术,显著提升了导航性能。实验结果表明,该方法使模拟井下工作中的运输效率提升24.91%,路径搜索时间缩短50%,为煤矿智能化建设提供了重要的技术支撑。
文章链接:https://link.cnki.net/urlid/34.1055.TD.20250408.1344.004
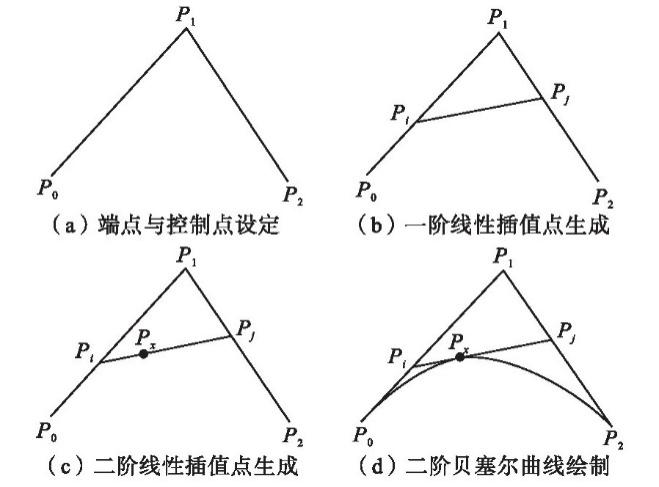
图2二阶贝塞尔曲线形成原理

图3A*算法路径平滑前后对比

